Projects

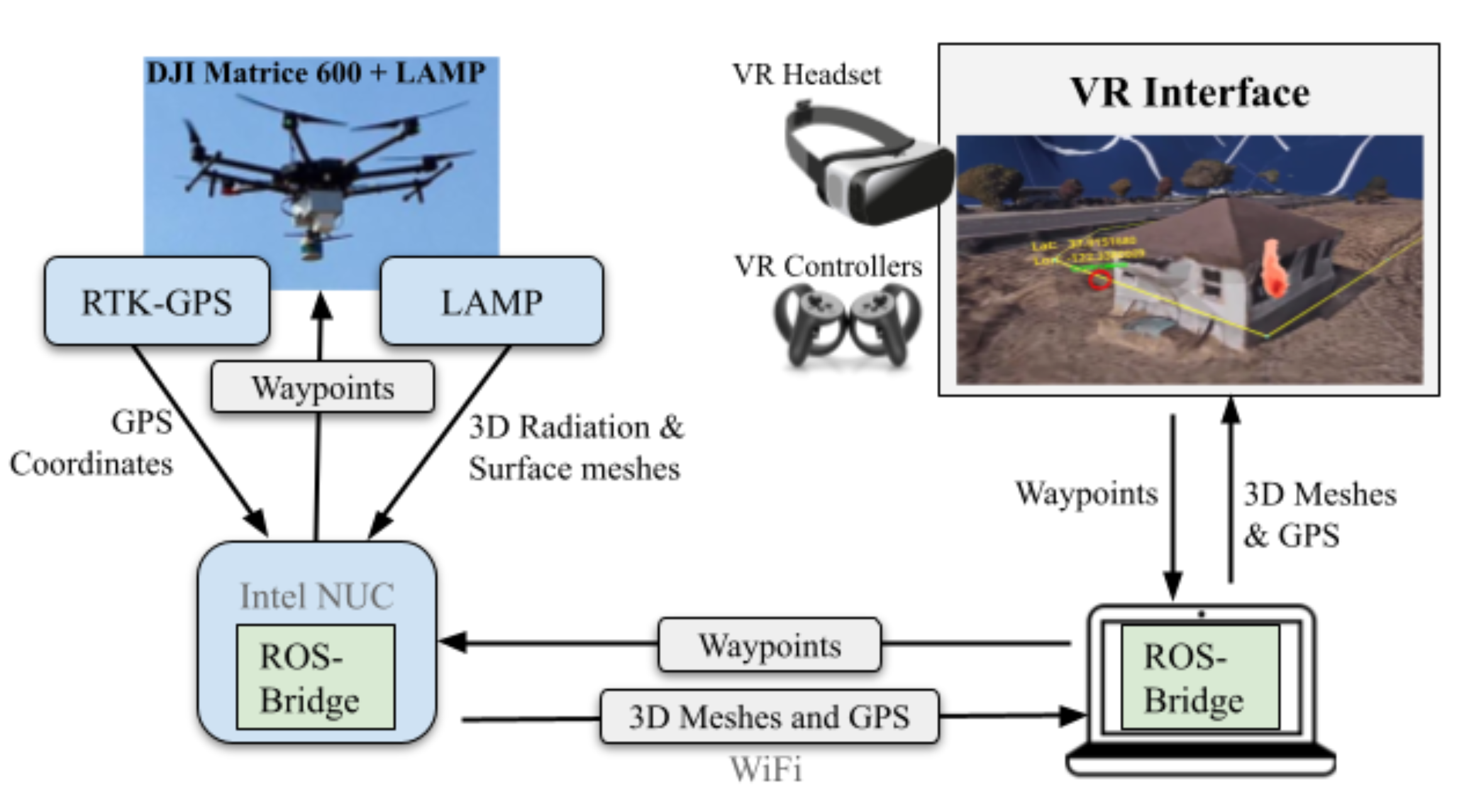
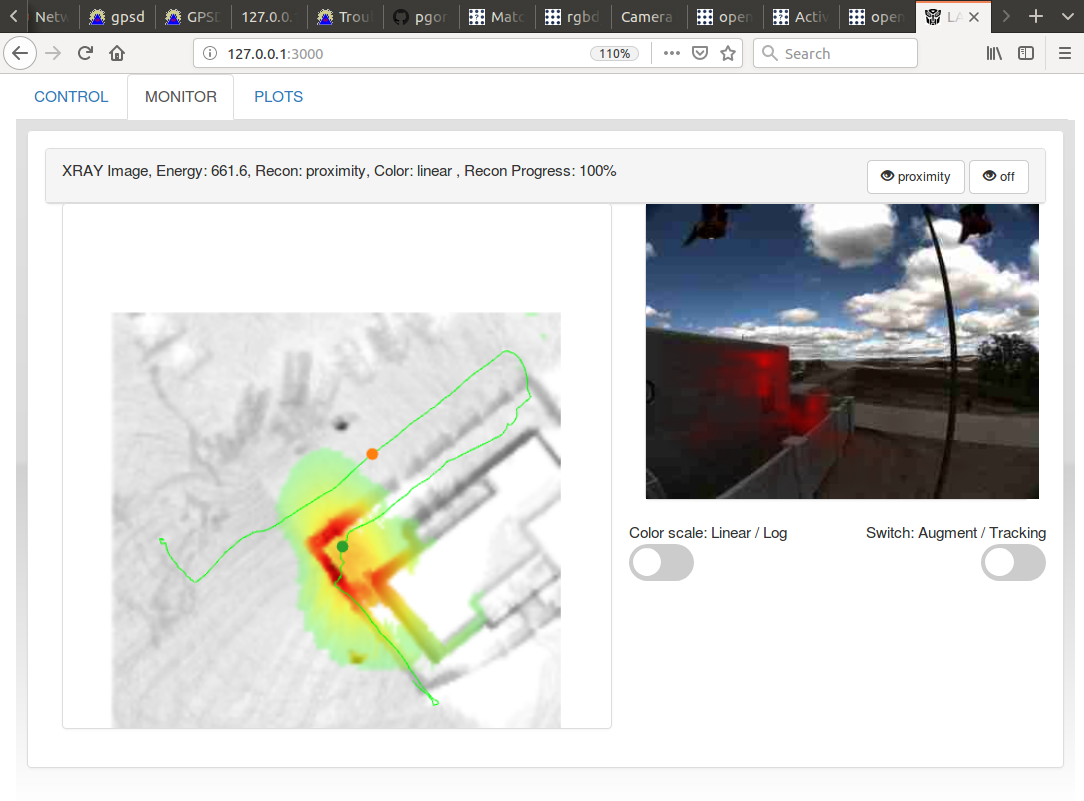
Nuclear threat reduction
Research for nuclear threat reduction.
Gamma-ray mapping (PDF) Point source quantification (PDF)
Closed loop ML platform for retro games.
Retro Mario with a continuous closed loop learning systems.
Github
Robotic Arm Path Planning with potential fields
Potential field-based planning for 6DOF arm in cluttered spaces.
Github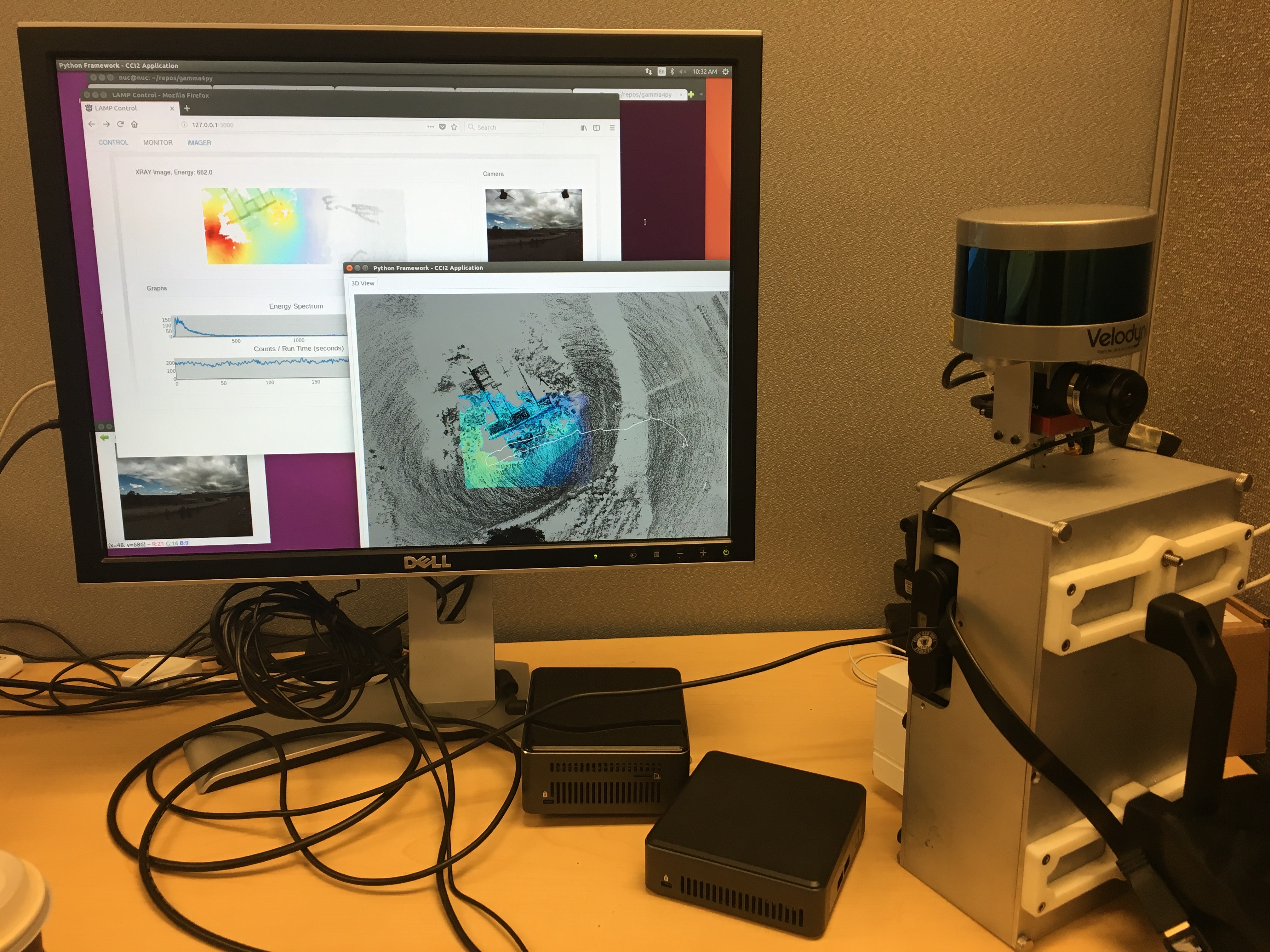
Sensor fusion platform
Sensor fusion platform for run-time fusion of sensors.
Nuclear Threat Reduction Signed Distance Fields
Autonomous drone
Integrate Behavior Tree with a drone simulated in Gazebo.
Real time Potree pointcloud aggregation
Implemented potential field-based planning for 6DOF arm in cluttered spaces.
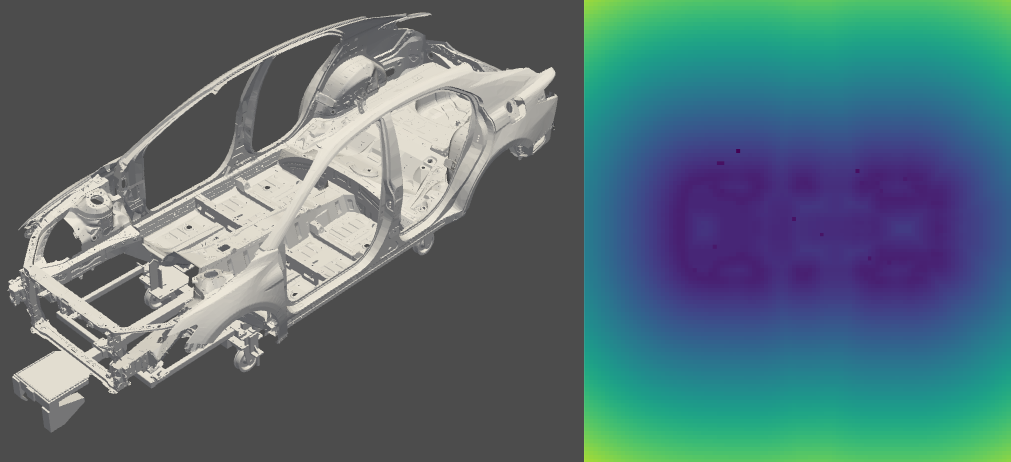
ICP optimization with distance fields
Optimization for aligning aligning design models.

Project AirSim integration
Integrate eVTOL research into Project AirSim.
AR
Mixed reality in 3D reconstructed space.
IR beacon registration
Registering coded LEDs in the IR spectrum.

Raspberry Pi Drone
Fully programmable drone on the Raspberry Pi platform.